ubuntu
功能测试
tcp
脑科学
最优假彩色合成
激活函数
vr
armv8
内核
记事本
图像超分辨率
File的创建功能
工作流程数字化
嵌入式linux
脚本实战
413
电机控制
unicode、
图像按钮
swiftui
毫米波雷达
2024/4/16 15:09:04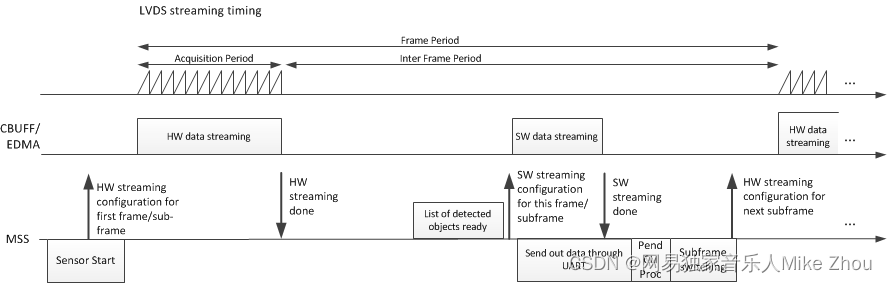
【TI毫米波雷达】MMWave SDK:UART串口数据发送时的数据丢失、出错及避坑配置,Polling方法和Write方法的使用避坑
【TI毫米波雷达】MMWave SDK:UART串口数据发送时的数据丢失、出错及避坑配置,Polling方法和Write方法的使用避坑 文章目录 BUG复现Polling方法和Write方法的使用避坑串口配置避坑附录:结构框架雷达基本原理叙述雷达天线排列位置芯片框架Demo工…

TI单芯片毫米波雷达代码走读(二十七)—— 角度维(3D)处理之通道间幅相一致性补偿
TI单芯片毫米波雷达1642代码走读(〇)——总纲 书接上回,我们知晓了3D处理的主要流程,相信大家都已理解基本的原理。在正式进行数据分析之前还有一步关键的步骤需要说明,即通道间的幅相一致性补偿问题。
细心的朋友可能注意到,在3D处理的的原码中有两个函数我一直没有讲:…
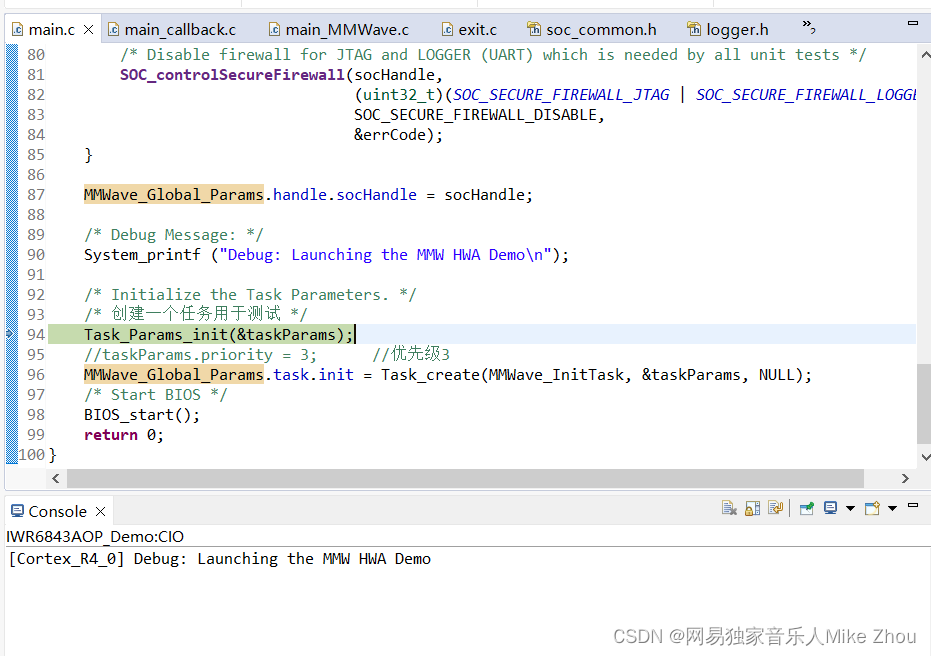
【TI毫米波雷达笔记】SOC外设初始化配置及驱动(以IWR6843AOP为例)
【TI毫米波雷达笔记】SOC外设初始化配置及驱动(以IWR6843AOP为例)
最基本的工程建立好以后 需要给SOC进行初始化配置 SOC_Cfg socCfg; //SOC配置结构体Task_Params taskParams; //任务参数SOC_Handle socHandle;ESM_init(0U); …
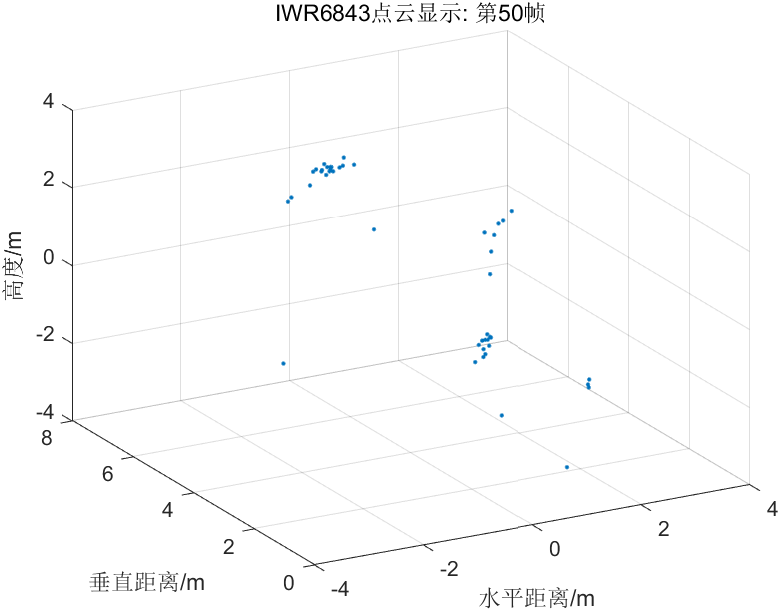
毫米波雷达4D点云生成(基于实测数据)
本期文章分享TI毫米波雷达实测4D点云生成的代码,包含距离、速度、水平角度、俯仰角度,可用于日常学习。
处理流程包含:数据读取和解析、MTI、距离估计、速度估计、非相干累积、2D-CFAR、水平角估计、俯仰角估计、点云生成、坐标转换等内容。…

TI 毫米波雷达开发系列之mmWave Studio 和 Visuiallizer 的异同点雷达影响因素分析
TI 毫米波雷达开发之mmWave Studio 和 Visuiallizer 的异同点 引入整个雷达系统研究的目标分析影响这个目标的因素硬件影响因素 —— 雷达系统的硬件结构(主要是雷达收发机)AWR1642芯片硬件系统组成MSS 和 DSS 概述MSS 和 DSS 分工BSS的分工AWR1642 组成…
【TI毫米波雷达】IWR6843AOP的官方文件资源名称BUG,选择xwr68xx还是xwr64xx,及需要注意的问题
【TI毫米波雷达】IWR6843AOP的官方文件资源名称BUG,选择xwr68xx还是xwr64xx,及需要注意的问题 文章目录 demo工程out_of_box文件调试bin文件名称需要注意的问题附录:结构框架雷达基本原理叙述雷达天线排列位置芯片框架Demo工程功能CCS工程导…
【TI毫米波雷达】官方工业雷达包的生命体征检测环境配置及避坑(Vital_Signs、IWR6843AOPEVM)
【TI毫米波雷达】官方工业雷达包的生命体征检测环境配置及避坑(Vital_Signs、IWR6843AOPEVM) 文章目录 生命体征基本介绍IWR6843AOPEVM的配置上位机配置文件避坑上位机start测试距离检测心跳检测呼吸频率检测空环境测试 附录:结构框架雷达基…

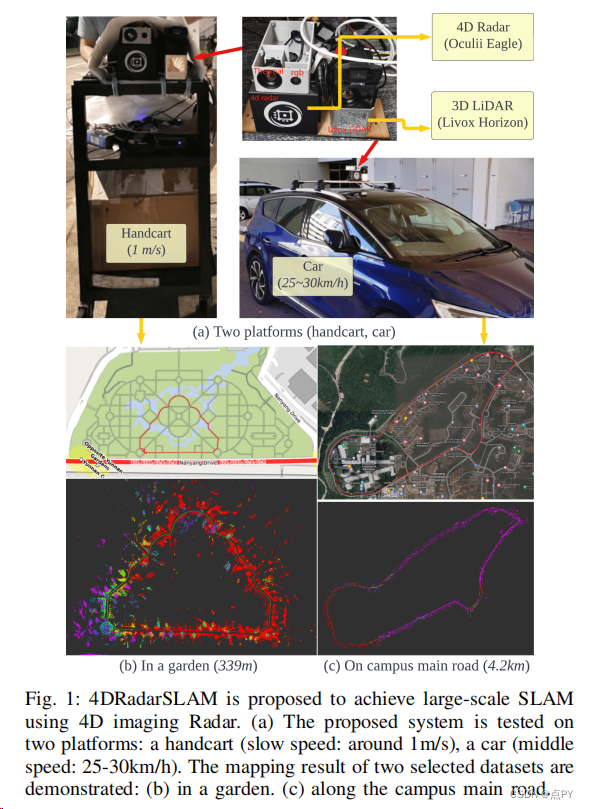
毫米波雷达slam论文汇总
文章目录 20234DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale Environments based on Pose Graph Optimization 2023
4DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale Environments based on Pose Graph Optimization
code: https://github.com…
【TI毫米波雷达笔记】毫米波雷达芯片结构框架解析(以IWR6843AOP为例)
【TI毫米波雷达笔记】毫米波雷达芯片结构框架解析(以IWR6843AOP为例)
代码解读:
blog.csdn.net/weixin_53403301/article/details/132565590芯片框架
IWR6843AOP可以分成三个主要部分及多个外设 BSS:雷达前端部分 MSSÿ…
【TI毫米波雷达笔记】MMwave毫米波雷达API配置及驱动(以IWR6843AOP为例)
【TI毫米波雷达笔记】MMwave毫米波雷达API配置及驱动(以IWR6843AOP为例)
MMWave API(位置处于BSS)可以被DSS和MSS调用 通过Mailbox进行数据通信 毫米波雷达接口
#include < ti/control/mmwave/mmwave.h>
#include <ti/…
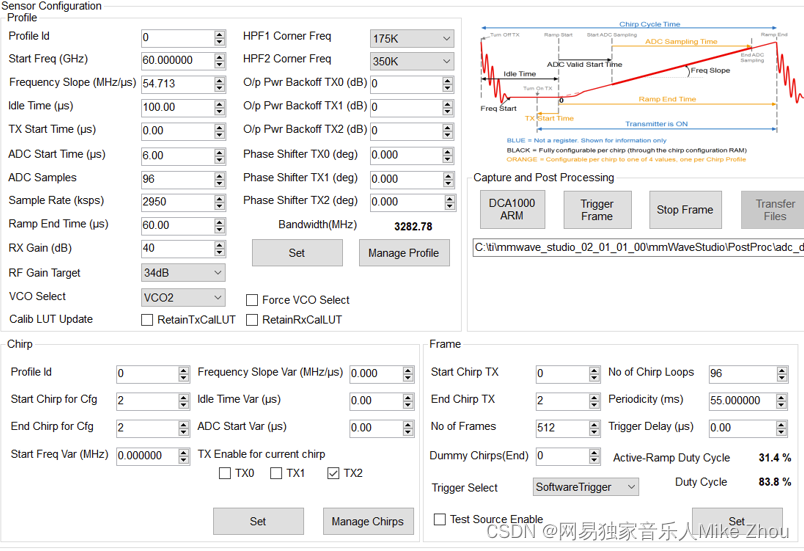
【毫米波雷达】雷达参数配置及各种流程入门(个人理解)
【毫米波雷达】雷达参数配置及项目开发流程入门(个人理解) 文章目录 雷达项目开发流程项目需求和应用分析硬件选型天线设计后级算法 雷达参数设计工作原理数据采样ADC采样TX使能、ADC采样时间分辨率分辨力 chirps数附录:结构框架雷达基本原理…
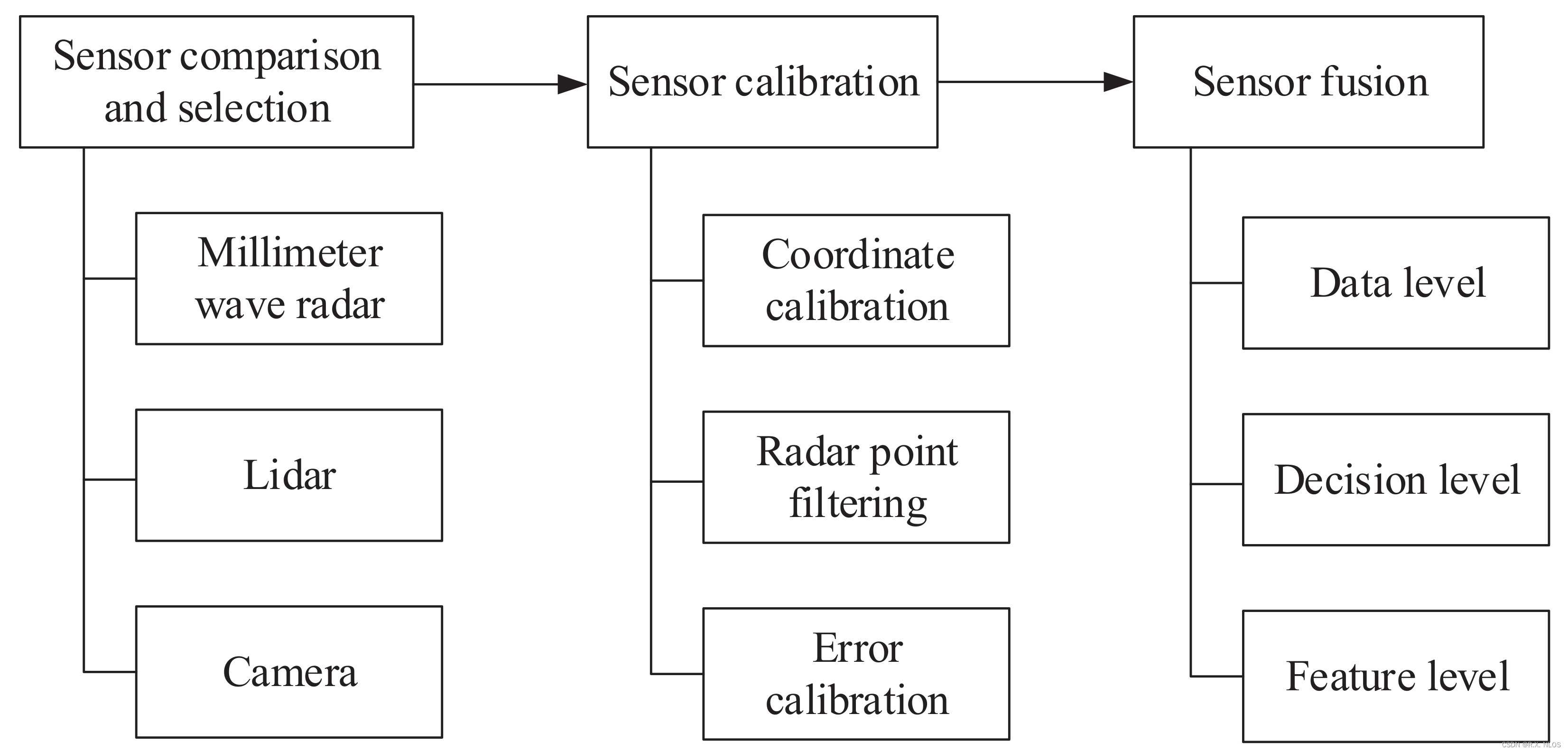
概念解析 | 毫米波雷达与计算机视觉的融合
注1:本文系“概念解析”系列之一,致力于简洁清晰地解释、辨析复杂而专业的概念。本次辨析的概念是:毫米波雷达与计算机视觉的融合。 毫米波雷达与计算机视觉的融合 Sensors | Free Full-Text | MmWave Radar and Vision Fusion for Object Detection in Autonomous Driving: A …
使用TI AWR2243p RF EVM和 DSP EVM 采集数据并解析
2022年1月11日 更新 TDM MIMO 和 BF使用模式2021年9月26日 更新中,有问题请留言
1 硬件
2243P RF EVM 和 DSP EVM 级联
2 软件
\mmwave_studio_03_00_00_14
3 mmw studio 设置并采数
可以使用GUI 进行采数和处理。但是控制麻烦。建议走通过GUI一次,…
使用TI AWR1843 Boost EVM和 DCA1000 EVM 实时采集ADC数据并解析
2021年6月11日 更新中... 先记录一些关键坑。有问题可以留言2021年9月26日 更新了matlab处理相关参考的文件路径2022年8月9日 更新 matlab 解析UDP 实现 streaming
硬件
TI AWR1843 Boost EVM ES2.0(AWR1642 ES2.0类似)
DCA1000 EVM
需要注意的几点
…
OpenRadar DOA函数 Bartlett/CBF和Capon使用
Bartlett / CBF原理看这里 Capon原理看这里
这里只讲怎么调用openradar提供的aoa_bartlett和aoa_capon函数: openradar的作者代码水平很高,但里面有很多匪夷所思的写法,比如他demo里的解析文件格式就很迷啊等等…
先获取矢量矩阵 (steering…

【TI毫米波雷达笔记】CCS雷达工程调试(以IWR6843AOP为例)
【TI毫米波雷达笔记】CCS雷达工程调试(以IWR6843AOP为例)
先前我们讨论了如何建立工程并编译 包括DSS和MSS部分
也就是DSP部分和cortex-r4f部分
通过编译 可以生成一个.out文件 如图 同样的 也有xer4f格、xe674格式等等 这取决于编译的工程配置 但这…
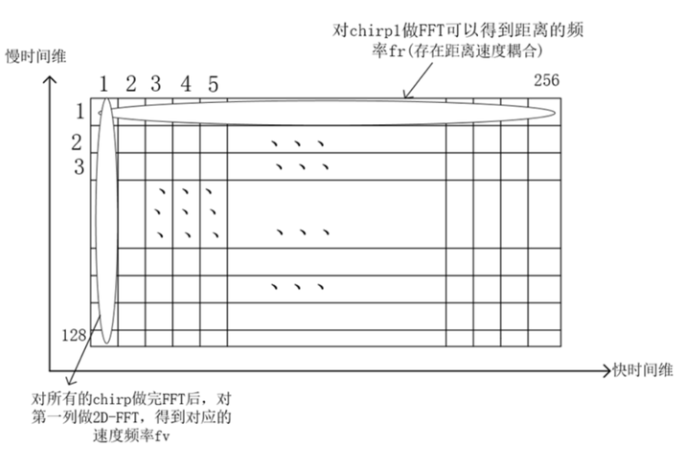
毫米波雷达3-三个FFT(距离,速度,角度)
文章目录 快慢时间维度空间维度FFT原理useful links快慢时间维度
由于电磁波传播的速度非常之快,导致了回波间隔比发射间隔小了好几个数量级
下图中,每一行(快时间维)对应的是一个脉冲回波的连续采样,在快时间维度,即使一个移动的物体,我们也可以看作不动,那么对于快…
【TI毫米波雷达笔记】IWR6843AOP的CCS工程模板创建(DSS)
【TI毫米波雷达笔记】IWR6843AOP的CCS工程模板创建(DSS)
如果还不会配置MSS 则看我的文章:
blog.csdn.net/weixin_53403301/article/details/132274755大体上与MSS创建也差不多 SDK我用的3.5版本
DSS工程模板:
download.csdn.…

毫米波雷达在汽车领域的原理、优势和未来趋势
1 毫米波雷达的原理
汽车引入毫米波雷达最初主要是为了实现盲点监测和定距巡航。毫米波实质上是电磁波,其频段位于无线电和可见光、红外线之间,频率范围为10GHz-200GHz。工作原理类似一般雷达,通过发射无线电波并接收回波,利用障…
【TI毫米波雷达】上电时序、串口回环BUG及SOP模式不正常工作的解决方案(LP87524电源PMIC芯片的BUCK供电时序配置)
【TI毫米波雷达】雷达上电时序及SOP模式不正常工作的解决方案(LP87524电源PMIC芯片的BUCK供电时序配置) 文章目录 上电时序上电以后的雷达串口回环问题延迟上电时序LP87524电源PMIC芯片的BUCK供电时序LP87524电源PMIC芯片的BUCK默认供电输出附录&#x…
【TI毫米波雷达笔记】ADCBuf外设初始化配置及驱动(以IWR6843AOP为例)
【TI毫米波雷达笔记】ADCBuf外设初始化配置及驱动(以IWR6843AOP为例) ADCBuf是为mmwave服务的 在配置之前需要配置好mmwave
#include < ti/drivers/ADCBuf.h>对应mmwave studio:
ADCBuf模块上电
调用:
ADCBuf_init();A…

毫米波雷达2-雷达的工作模式
文章目录 flash mode: 用于烧写functional mode: Power off the board and remove the jumper from only header SOP2 (this puts the board back in functional mode) flash mode: 用于烧写 functional mode: Power off the board and remove the jumper from only header SOP…

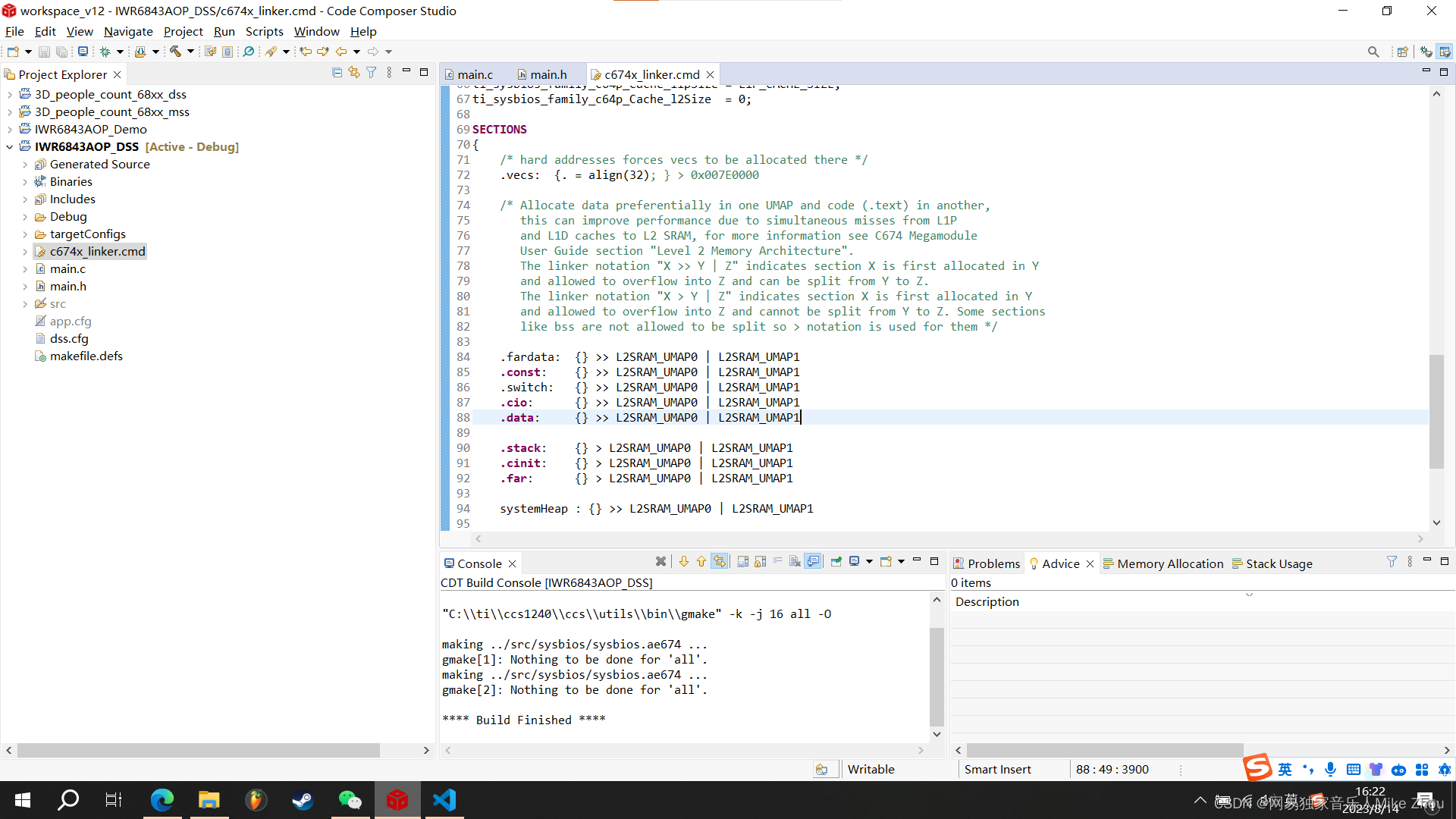
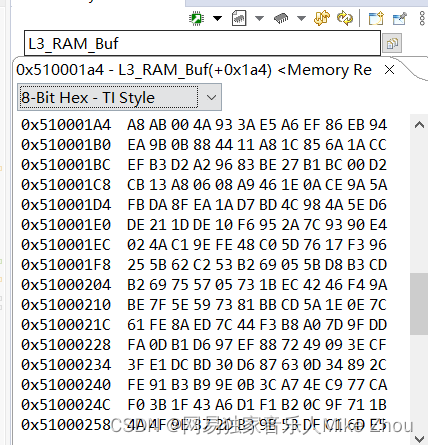
【TI毫米波雷达笔记】CCS雷达工程内存RAM指定(DATA_SECTION,以IWR6843AOP为例)
【TI毫米波雷达笔记】CCS雷达工程内存RAM指定(DATA_SECTION,以IWR6843AOP为例)
工程建立好以后会有一个cmd文件 此文件描述的是内存map
/*----------------------------------------------------------------------------*/
/* r4f_linker…